project.")
Underwater sonar acoustics
by Claire Calcagno
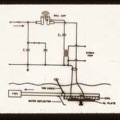
Acoustic waves provide the means to make observations and measurements, as well as to communicate, under water. By measuring the time it takes for a sound pulse to reach an observer, it is possible to measure the distance between that source and the observer. Distances can be similarly calculated by timing the return echo of a sound pulse emitted by the observer.


For the next several decades Edgerton worked on improving his sonar instrument, or sub-bottom profiler, which he nick-named a ‘mud penetrator’, to probe the sea floor seeking to identify and record what lay beneath the sediments. The constant challenge he faced was to balance the competing desires for precision and range: higher acoustic frequency gives greater precision but lower distance range, and vice versa. Sound is also absorbed differentially according to the type of sediment being examined and the interference such as caused by gas bubbles. So Edgerton sought as many opportunities as possible to field-test his experimental instruments in the greatest variety of conditions to determine their working parameters and optimize their performance.


Edgerton experimented by shifting the angle of the sonar beam sideways, realizing that this was a way to be able to detect objects proud of the sea bed. His former student and onetime colleague Martin Klein went on to develop the first commercially viable dual-channel side scan sonar, based on these beginnings, becoming a recognized leader in the field.
The sonar instrument is typically towed behind a vessel on an instrument platform, or “fish”. With side scan sonar a fan-shaped beam of sound is directed off both sides of the survey ship, and typically surveys swaths of a few hundred meters to either side. The reflected sound is then recorded visually onto a recorder on board the ship.